Valmiin 6-renkaisen robotin massa on runsaat 10 kilogrammaa ja pituus 60 senttimetriä eli se on lähes saman kokoinen kuin Sojourner, ensimmäinen Marsissa todella toiminut kulkija. Kulkijan toiminta-ajaksi luvataan noin 5 tuntia jatkuvaa käyttöä. Tuossa ajassa laitteella ehtii ajaa kolmen kilometrin matkan - sen vauhti kun on huimat 17 senttiä sekunnissa.
Osien arvioidaan maksavan runsaat 2000 euroa, mutta jos tee-se-itse -henkilön varastosta sattuu löytymään käyttökelpoisia osia, summa voi pienentyä kummasti. Ero oikean Mars-kulkijan kehitys- ja rakennuskustannuksiin on huima: Sojournerin kokonaishinta oli runsaat 20 miljoonaa euroa. Halpuudestaan huolimatta tekniikka on samankaltaista kuin Mars-mönkijöissä.
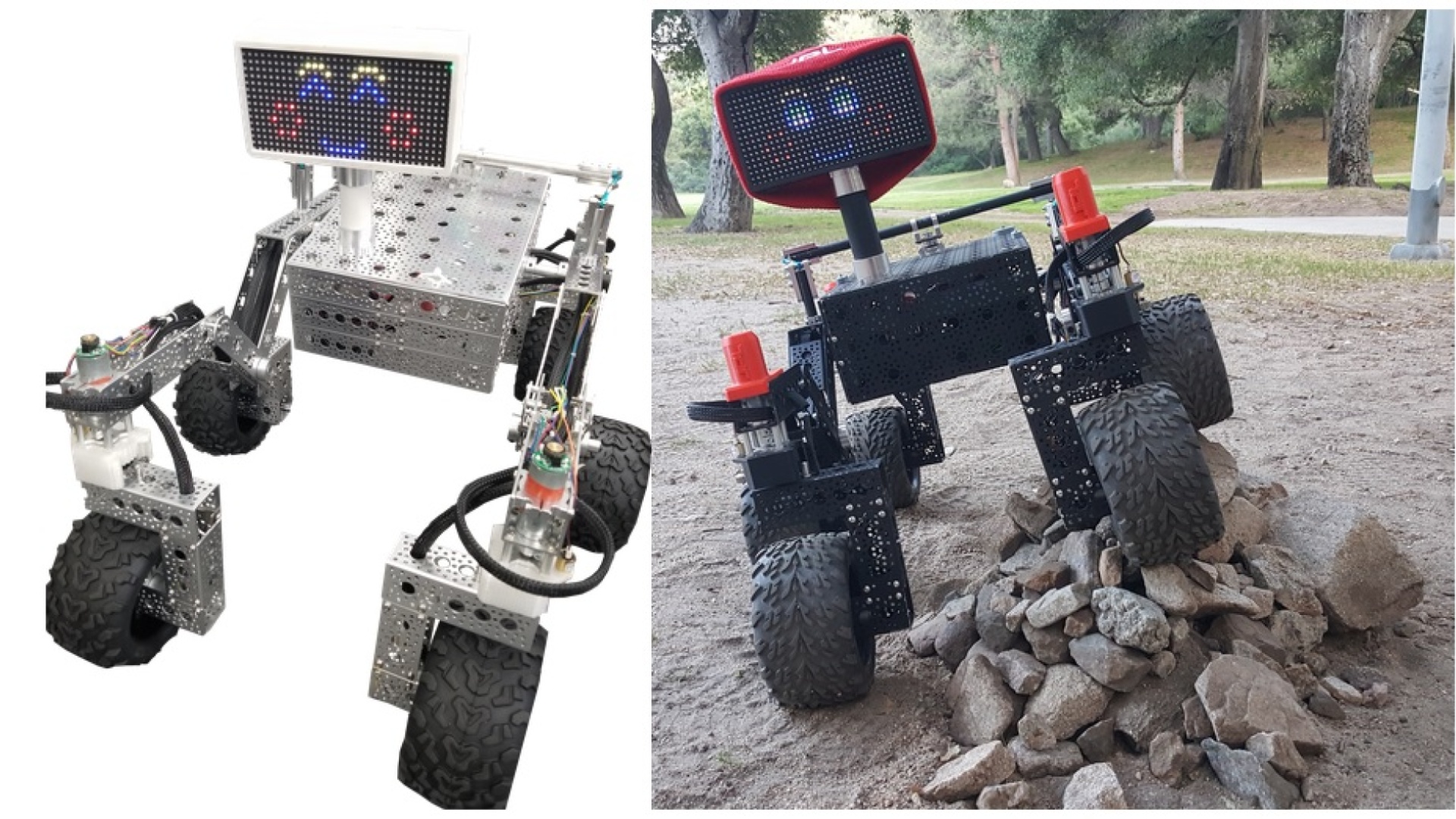
Laite pystyy kulkemaan erittäin kivikkoisessa ja epätasaisessa maastossa. Kaikki kuusi vetävää rengasta ovat koko ajan kosketuksissa pintaan. Nousukulma laitteella voi olla noin 30 astetta, ja sivusuunnassa se sietää jopa 45 asteen kallistusta. Todelliset arvot riippuvat tietystikin tee-se-itse -rakentelijan käyttämistä osasista. Kulkijan saa kyllä liikkumaan nopeamminkin, mutta silloin nousukulma ei voi olla aivan yhtä jyrkkä kuin perusohjeilla.
Laitteen aivoina toimii pieni, halpa mutta monipuolinen Raspberry Pi -tietokone.
Kulkijaa voi käyttää sekä android-sovelluksen että Xboxin ohjaimen välityksellä. Lisäksi rakentelijat voivat vapaasti kehittää omia ohjaussysteemejään, vaikkapa ääniohjauksen tai kameroiden avulla täysin autonomisesti toimivan laitteen.
Rakentajalta vaadittava taitotaso ei ole päätä huimaava. Hänen täytyy osata mm. käyttää rautasahaa ja viilaa sekä kyetä kolvaaman ja ymmärtää sähköjärjestelmien päälle. Softapuolella suositellaan perustason Linux- ja Python-ohjelmointitaitoja. Mutta tekemällä oppii, ja projektin aikana on tarkoitus opetella taitoja lisää.
Rakennusprojektin toteutuminen vaatii noin 200 henkilötyötuntia, kokemattomalta varmasti enemmän. Kyse on siis vähintään noin kuukauden täysipäiväisestä työstä.
Kulkijan tarkoitus on antaa aiheesta kiinnostuneille helppo ja halpa tapa kehittää taitojaan. Mars-kulkijat rakentanut laitos kuvailee projektia "opetus- ja oppimiskokoemukseksi niille, jotka haluavat osallistua tekniikan, softan, elektroniikan tai robotiikan kehittämiseen". Tavoite on innoittaa eritoten seuraavan sukupolven tekijöitä.
Kulkijan tarjoaa Jet Propulsion Laboratory, Nasan robotiikkaan erikoistunut tutkimus- ja kehityslaitos. JPL sijaitsee Los Angelesin kupeessa Pasadenassa.
Lisää projektista voi lukea Open Source Rover -sivuilta, ja vertaistukea ja osviittaa erilaisista ratkaisuista voi hakea projektin keskustelupalstalta. Varsinaiset rakennusohjeet löytyvät GitHubin sivulta.
Kuvat: NASA / JPL / Open Source Rover