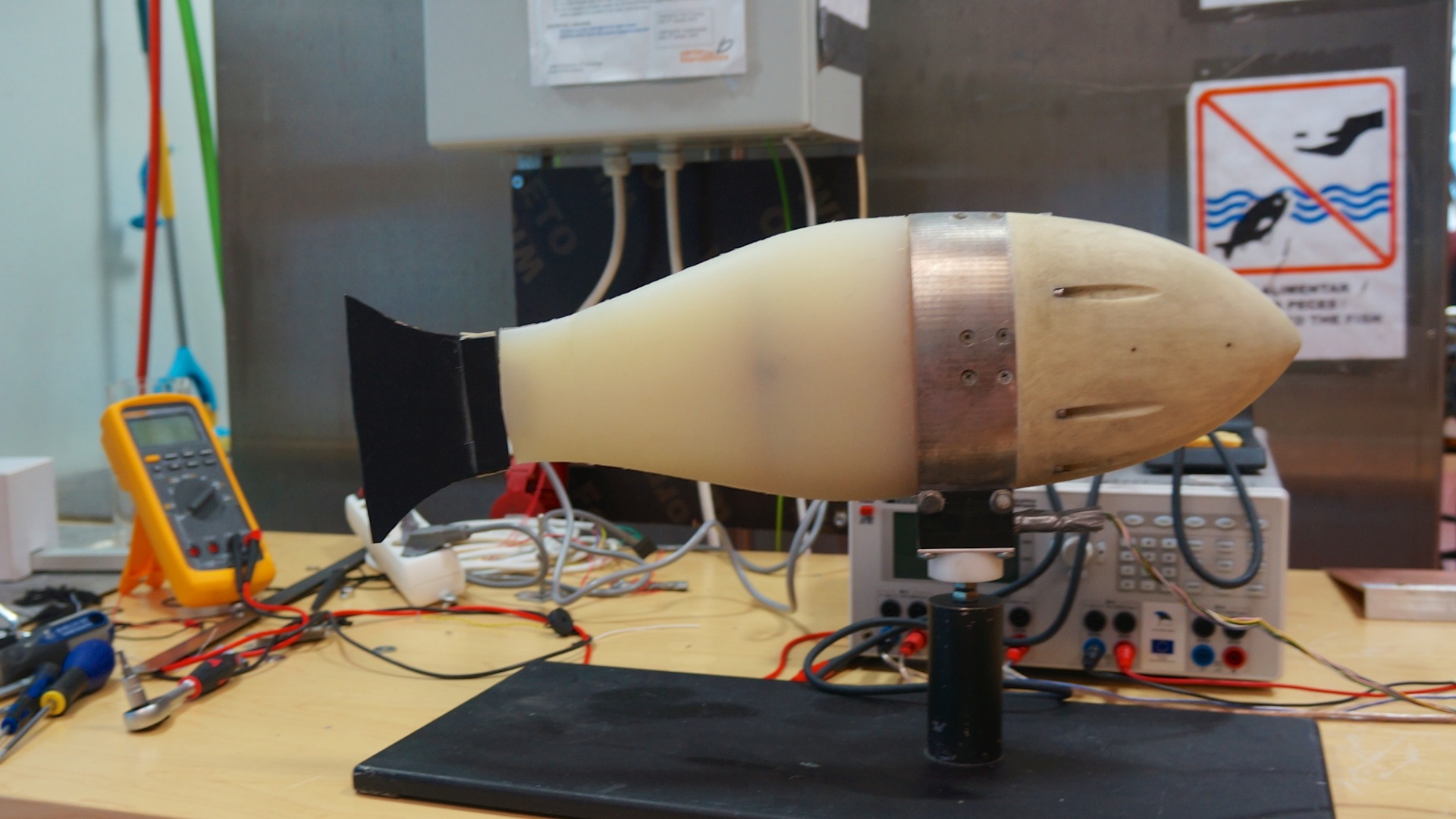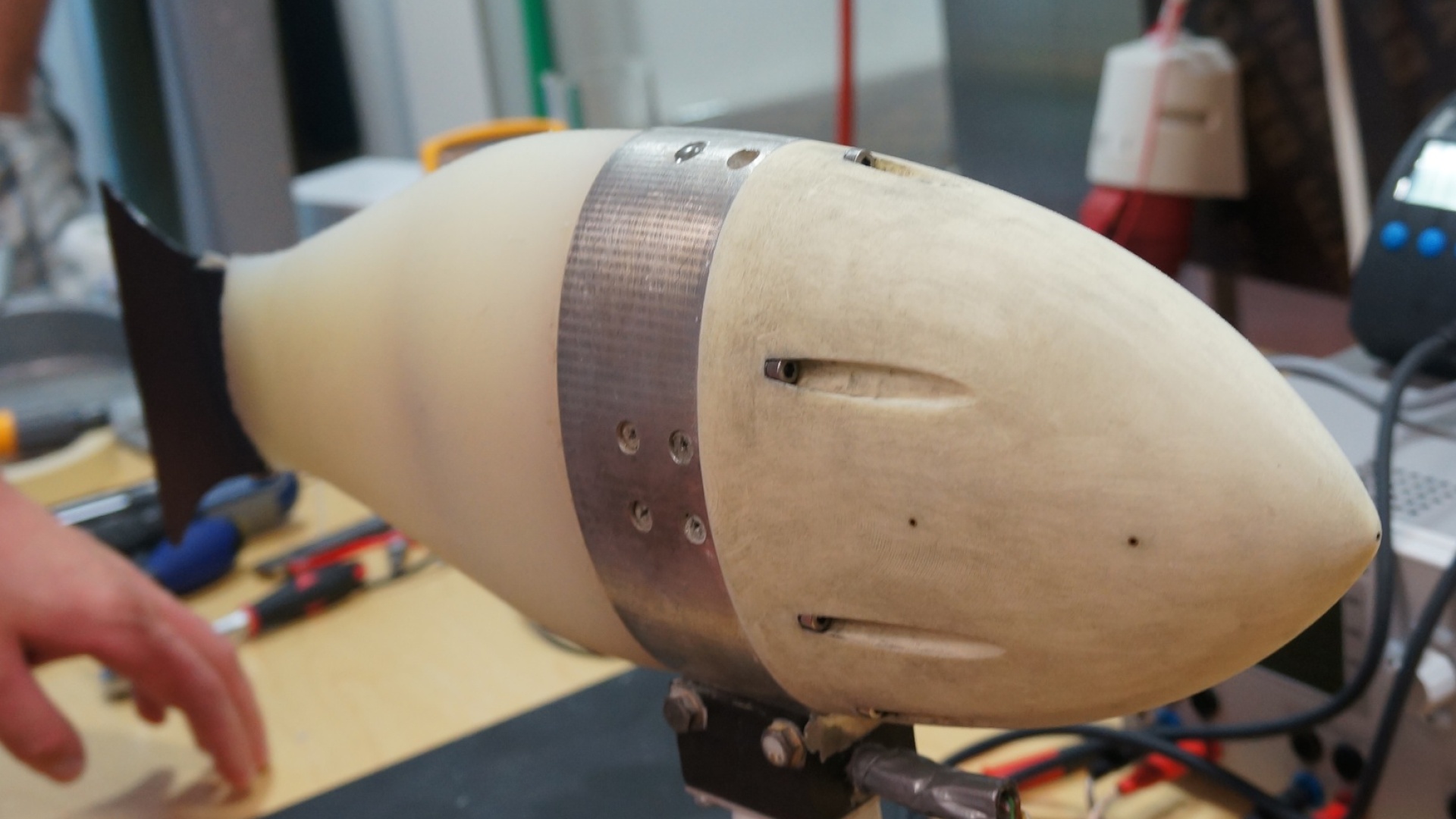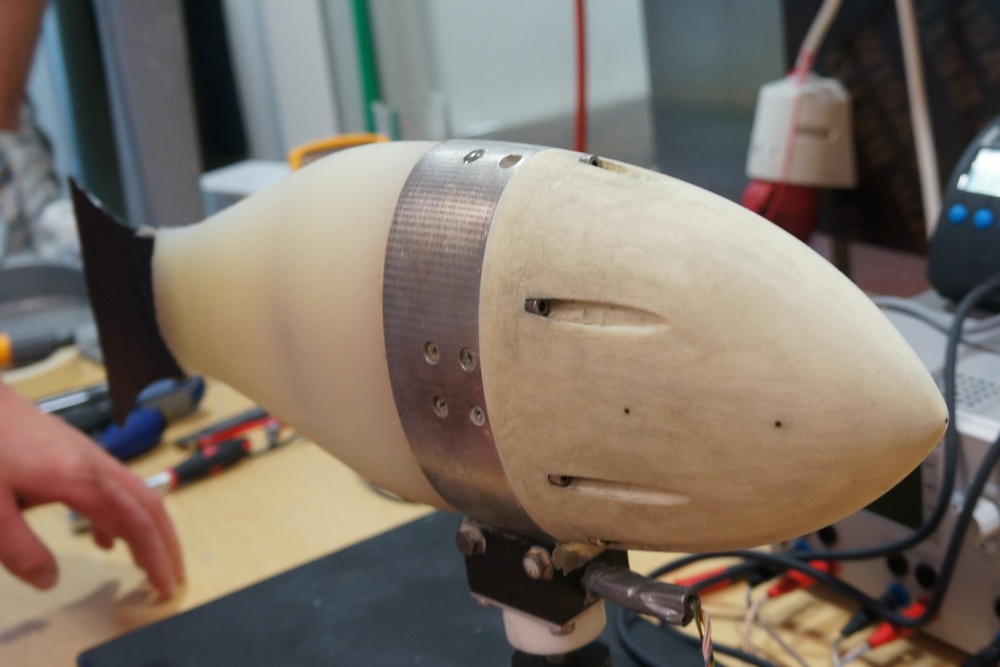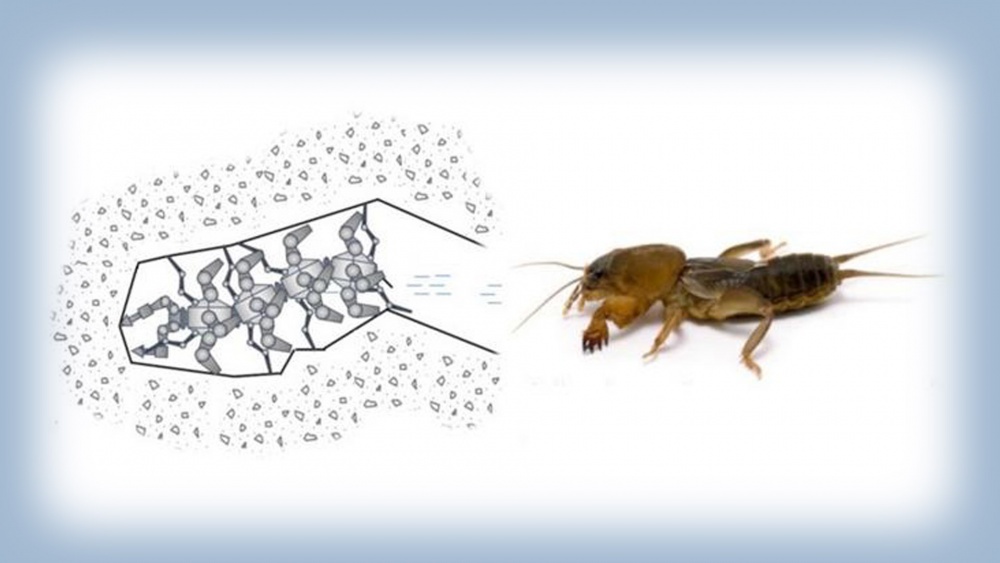
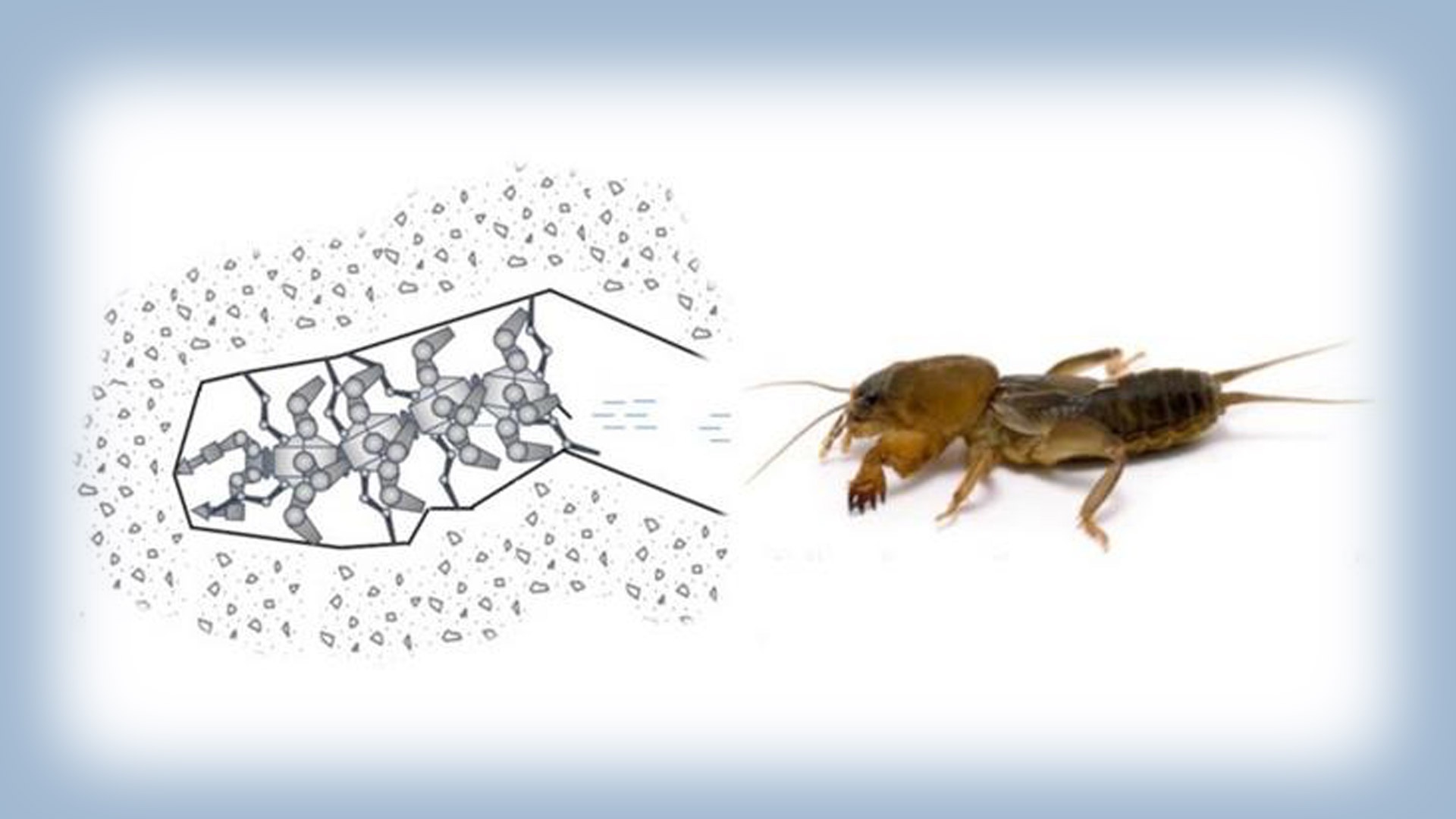
Tampereen yliopiston mekatroniikan tutkimusryhmä on mukana espanjalaisten vetämässä ROBOMINERS-hankkeessa. Sen tarkoituksena on rakentaa prototyyppi pienestä, luontoa jäljittelevästä ja itse itsensä kokoavasta kaivosrobotista, jonka avulla kaivostoiminta on tarkempaa ja ympäristöystävällisempää.
Erikoista kehitettävässä prototyypissä on myös se, että se pystyy kokoamaan itse itsensä osista ja konfiguroimaan itsensä eri työtehtäviä varten. Siksi kaivosta varten tarvitaan vain kapea kuilu, jos osat voidaan laskea maan alle.
Vast'ikään Horizon 2020 -rahoitusta saaneessa nelivuotisessa hankkeessa kehitetään laajemmin autonomisiin kaivosrobotteihin perustuvaa tulevaisuuden kaivosta, jonka avulla myös pienten ja vaikeasti saavutettavien mineraalivarantojen kaivaminen on mahdollista.
"Tutkimuksemme voi mullistaa koko kaivosteollisuuden", toteaa professori Kari T. Koskinen Tampereen yliopistosta vaatimattomasti yliopiston tiedotteessa.
"Tulevaisuudessa ei kenties tarvita enää suuria kaivosalueita, vaan pienet robotit työskentelevät maan alla louhien esiintymät tarkasti ja luontoa vahingoittamatta."
Kehitteillä oleva robottimainari pystyy työskentelemään myös veden alla, mikä tarkoittaa lisää hyötyjä ympäristölle sekä huomattavia kustannussäästöjä: kaivoksia ei olisi tarpeen pumpata tyhjiksi niihin nousevasta vedestä, mikä vähentää käsiteltävän jäteveden määrää.
Myöskään valtavia kasoja jätekiveä ei synny, sillä robotti louhii vain tarpeellisen. Pienet määrät jätekiveä voidaan käyttää jo kaivettujen osien täyttämiseen.
Roboteissa hyödynnetään erilaisia tekoäly- ja koneoppimissovelluksia, joiden avulla ne osaavat liikkua kaivoksessa ja tunnistaa louhittavat mineraalit.
"Esimerkki aivan uudenlaisista sensoreista ovat eräänlaiset keinotekoiset tuntosarvet, joiden avulla robotti havainnoi ympäristöään", Koskinen kertoo.
ROBOMINERS-hankkeen taustalla on huoli Euroopan omavaraisuudesta ja huoltovarmuudesta. Robottien avulla olisi mahdollista myös päästä taloudellisesti järjevästi käsiksi myös vanhoihin, jo perinteisin menetelmin kaivettuihin kaivoksiin jääneisiin varantoihin.
Tampereella osataan robotiikka
ROBOMINERS-hanketta johtaa espanjalainen Universidad Politecnica de Madrid, ja mukana on Tampereen yliopiston lisäksi 12 muuta partneria, joiden joukossa yliopistoja, tutkimuslaitoksia ja yrityksiä.
Tamperelaiset ovat omiaan tässä hankkeessa, koska Tampereen teknillisessä yliopistossa (joka yhdistyi vuoden 2019 alussa Tampereen yliopiston kanssa) on kehitetty runsaasti erityyppistä robotiikkaa ja vaativaa konetekniikkaa.
Hanke on myös erittäin poikkitieteellinen, sillä insinöörien lisäksi mukana hankkeessa on muun muassa geologeja.
Vaikka tuloksena toivotaan olevan uudenlaisia, kaupallisesti hyödynnettäviä kaivosrobotteja, on hankkeelle prototyypin rakentaminen kuitenkin tutkimushanke – ei vain insinööriratkaisu olemassaolevaan ongelmaan.
(Juttu on Tampereen yliopiston tiedote hieman editoituna. Otsikkokuva: Robominers.)