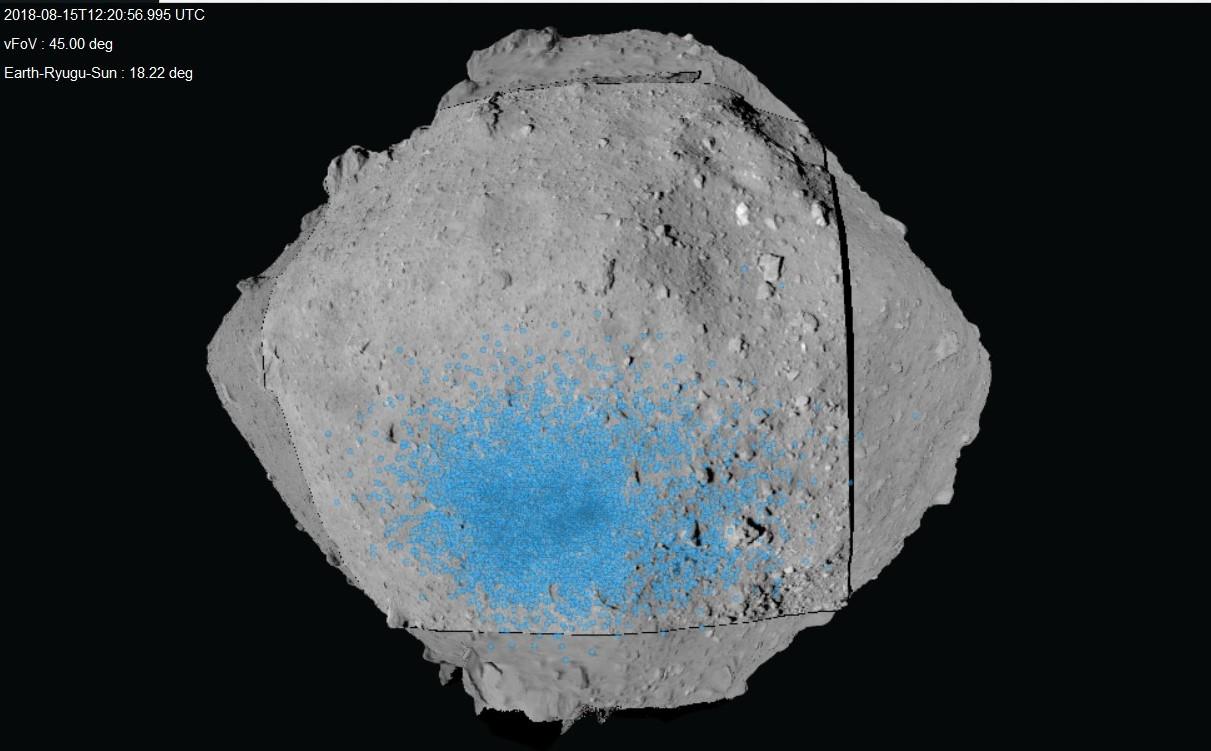
Tutkijat ja insinöörit eri puolilla maailmaa ovat pohtineet jo jonkin aikaa erilaisia tapoja, joilla Europan pinnanalaista valtamerta voitaisiin tutkia. Ongelmana on paitsi se, että laskeutujan lähettäminen Jupiterin kuun pinnalle on varsin vaikeaa, niin myös se, että laitteen pitäisi pystyä porautumaan useita kilometrejä paksun jään läpi ja sukelluslaitteen tulisi toimia autonomisesti pimeydessä jään alla.
Tutkijat ja insinöörit eri puolilla maailmaa ovat pohtineet jo jonkin aikaa erilaisia tapoja, joilla Europan pinnanalaista valtamerta voitaisiin tutkia. Ongelmana on paitsi se, että laskeutujan lähettäminen Jupiterin kuun pinnalle on varsin vaikeaa, niin myös se, että laitteen pitäisi pystyä porautumaan useita kilometrejä paksun jään läpi ja sukelluslaitteen tulisi toimia autonomisesti pimeydessä jään alla.
Koska vesi hyydyttää radiosignaalin varsin tehokkaasti, ei sukellusrobotti voisi olla kätevästi yhteydessä laskeutujaan; kilometrejä pitkän kaapelin päässä kulkeva sukelluslaite ei sekään ole kovin käyttökelpoinen.
Tähän saakka ehdotetut systeemit Europan meren tutkimiseen ovat olleet varsin ristiriitaisia. Poralaitteet kykenivät tekemään vain hyvin kapeita reikiä, kun taas kaikki hahmotellut sukellusrobotit ovat olleet melkeinpä suurempia kuin toteuttamiskelpoiset laskeutujat.
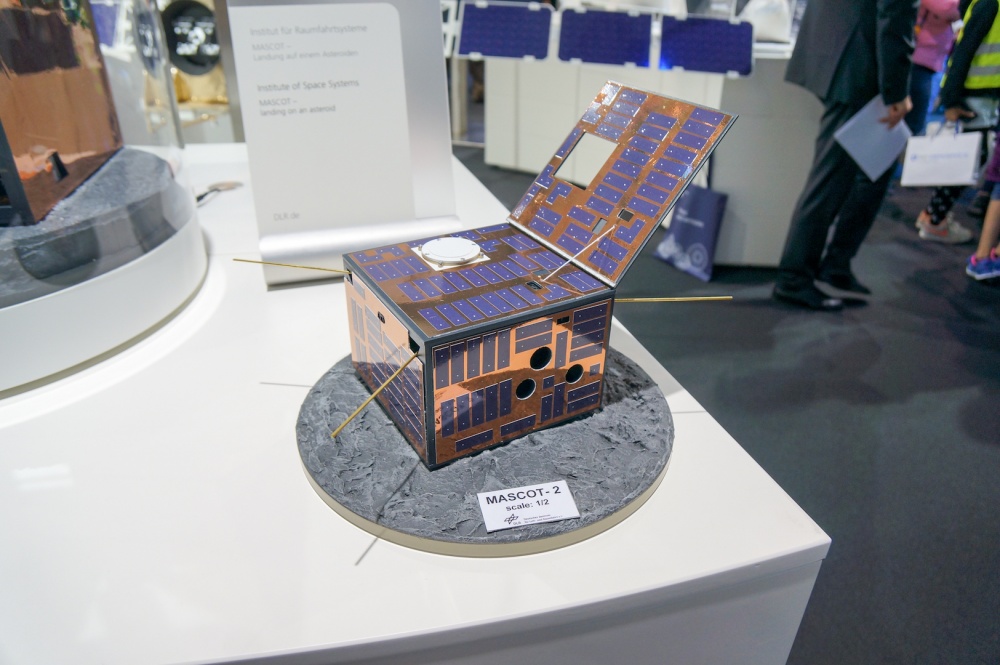
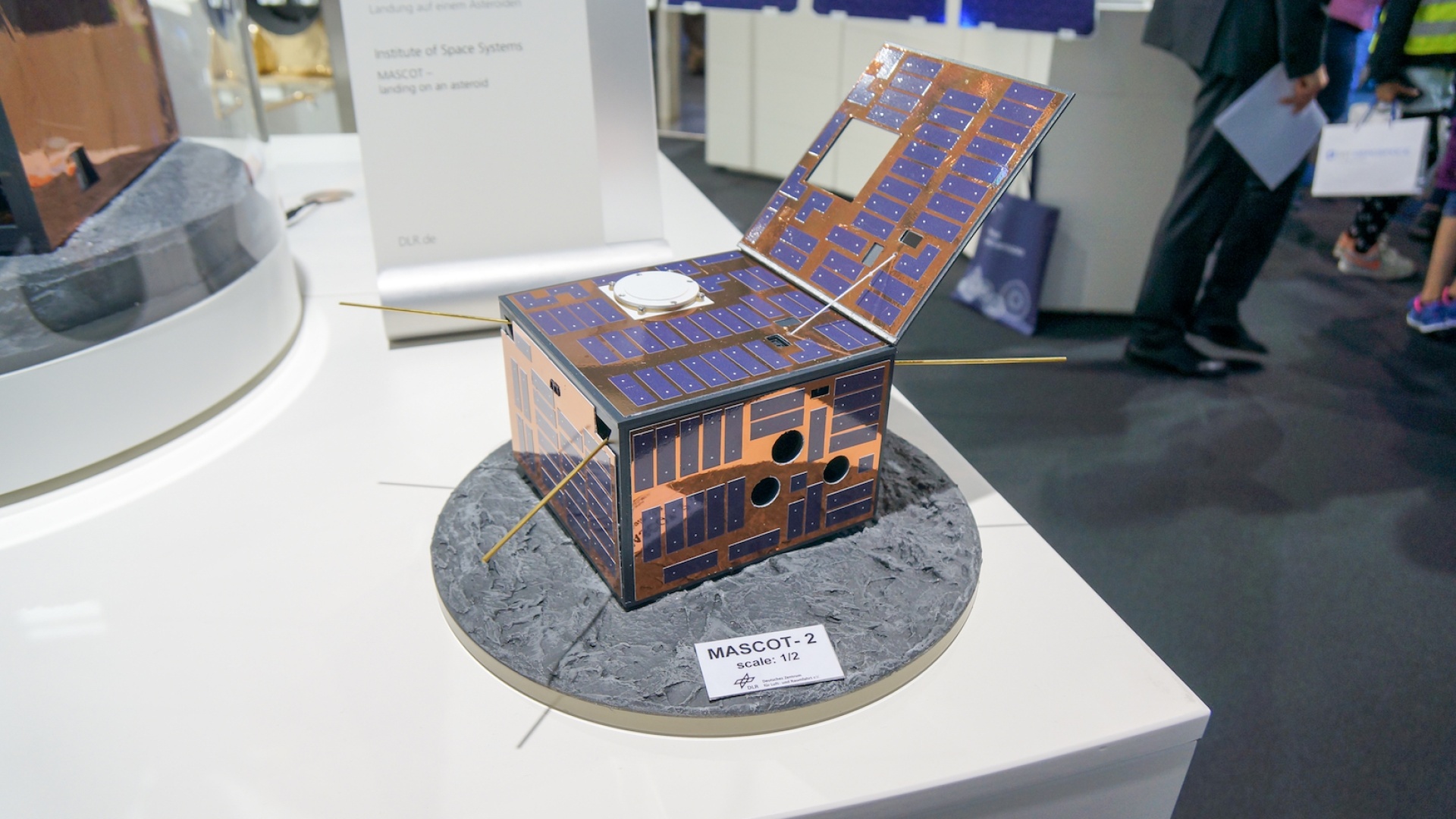
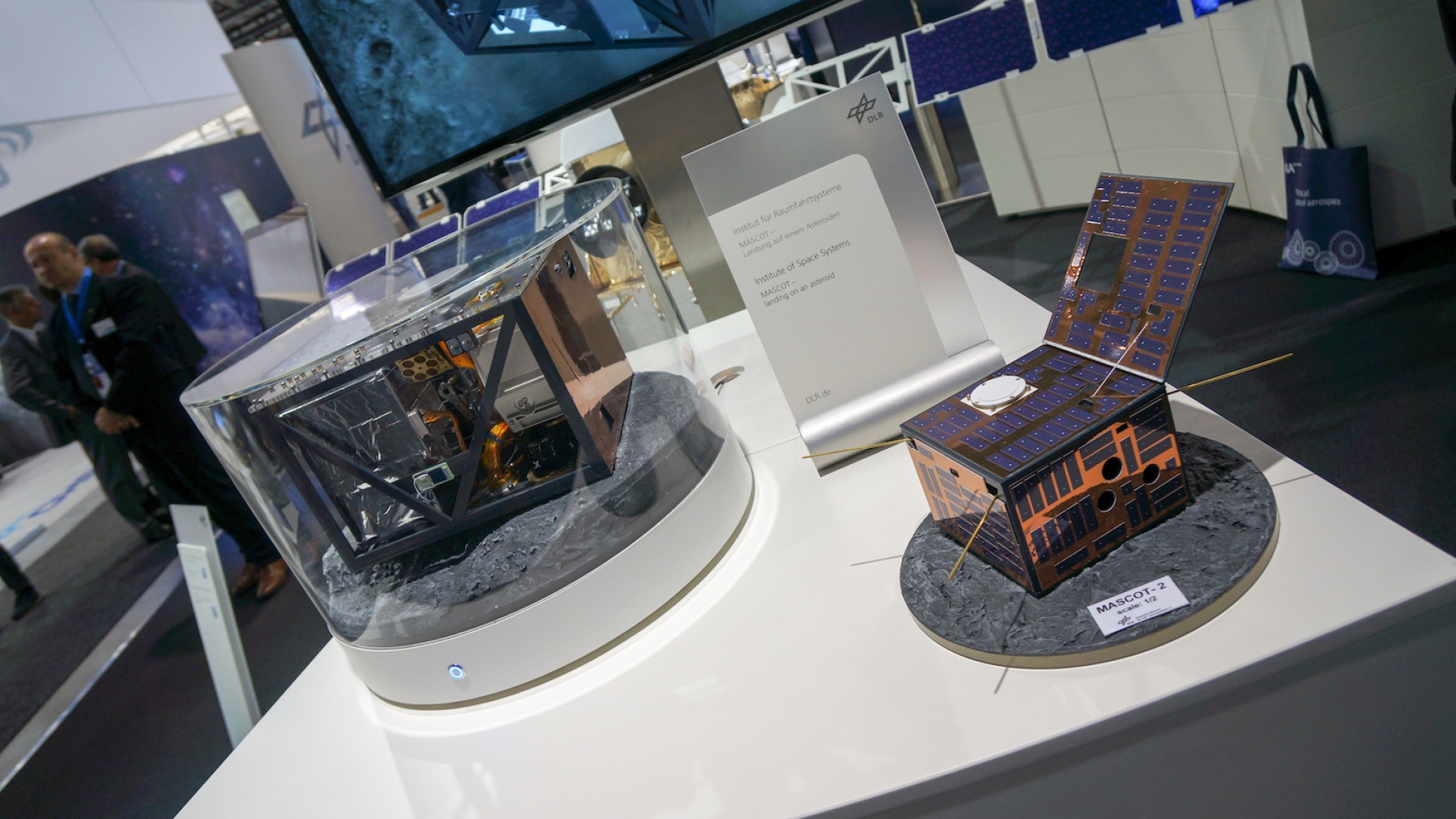
Nyt kuitenkin saksalaisilla on ratkaisu – ja sitä esiteltiin ensimmäistä kertaa julkisesti ILA-messuilla kesäkuun alussa Berliinissä. Tarkalleen ottaen kyseessä on Saksan ilmailu- ja avaruushallinnon (DLR) avustuksella työskennelleen, Bremenissä sijaitsevan Saksan kansallisen tutkimuskeskuksen tekoälytutkimusosaston robotiikkainnovaatiokeskuksen (DFKI) hanke ja mukana sen suunnittelussa on ollut Max Planck -instituutin Göttingenissä oleva aurinkokuntatutkimusryhmä.
Sukellusrobotti ei ole vain pelkkä suunnitelma, vaan jo toimiva laite. Sitä on testattu suuressa vesialtaassa sisätiloissa ja suunnitelmissa on lähteä sen kanssa seuraavaksi ulos. Laitetta ILAssa esitellyt Marius Wirtz toivoi, että seuraavassa vaiheessa (lue: jos saadaan lisärahoitusta) robottia voitaisiin testata vaikkapa talvella jossain Suomen järvessä ja sen jälkeen napa-alueilla.
Europan tutkimisen lisäksi autonominen, kovia kestämään rakennettu sukellusrobotti voisi täydentää myös tavallisia merentutkimuksessa käytettäviä liitimiä sekä auttaa muun muassa tutkimaan Etelämantereen jääkannen alla olevia, pitkään ulkomaailmasta eristyksissä olleita järviä.

Miten Europa-sukellus tapahtuisi?
Yllä oleva video kertoo pääkohdat sukellusrobotin tehtävästä, mutta tässä tapahtumien kulku hieman tarkemmin:
1. Se kuljetettaisiin Europan pinnalle laskeutujalla, jossa se voisi olla esimerkiksi keskellä pystyssä ajoainetankkien väliin jäävässä tilassa.
2. Kairasysteemi alkaa tunkeutua jään läpi jäätä sulattamalla, ei reikää siihen poraamalla. Yhden pitkän kairan sijaan kyseessä on siis pitkulainen sukkula, jonka sisällä sukellusrobotti on ja joka on yhteydessä laskeutujaan – ja sitä kautta Maahan – pitkällä kaapelilla.
3. Kun robotin sisältämä sukkula saapuu jään alareunaan, se kiinnittyy siihen ja avaa alapäässään olevan luukun. Sieltä vapautuu veteen pieni parvi autonomisia minirobotteja, jotka levittäytyvät ympäristöön ja kiinnittyvän jään alapintaan.
4. Sukellusrobotti työntyy esiin. Samalla erityinen suunnistusmajakka tulee näkyviin. Koska radiosignaali etenee hyvin huonosti vedessä, on majakka ennen kaikkea visuaalinen: siinä on kirkas valo, mutta myös lentokoneiden mustissa laatikoissa käytettävän radiolähettimen kaltainen laite, joiden avulla sukellusrobotti voi löytää takaisin lähtöpaikalleen. Tässä auttaa myös robotissa oleva tarkka gyroskooppisuunnistuslaitteisto.
5. Robotti on kiinni pidikkeessä, mutta yhteydenpito siihen tapahtuu esim. bluetooth- tai wifi-linkin välityksellä. Kummankin kantama riittää hyvin, kun robotti on kiinni pidikkeessään ja etäisyys lähettimen ja vastaanottimen välillä on vain vajaa kymmenen senttiä. Myös robotin akkujen lataaminen tapahtuu langattomasti; näin robotissa ei täydy olla riskialttiita reikiä ja niin yhteydenpito kuin lataaminenkin onnistuvat, vaikka robotti ei olisikaan täsmälleen paikallaan pidikkeessä.
6. Sukellusrobotti pystyy toimimaan täysin autonomisesti. Paitsi että se ei voisi olla sukelluksissa ollessaan yhteydessä Maahan tai edes laskeutujaan, kestää radioviestiltä 33-53 minuuttia saavuttaa Maa, joten kauko-ohjaaminen ei tulisi kyseeseen missään tapauksessa. Robotti ohjelmoidaan siis tutkimaan kaikkea kiinnostavaa, mutta erityisesti merenalaisia lähteitä, jotka voisivat olla samanlaisia kuin maapallolla merten syvyyksissä olevat "mustat savuttajat" – kuumat lähteet, joiden ympäristössä voisi olla elämää.
7. Sukellustensa välissä robotti tulee takaisin lähtöpaikkaansa siirtämään tietonsa laskeutujan kautta Maahan ja lataamaan akkujaan. Periaatteessa laite voisi toimia niin kauan kuin se saa aina uudelleen sähköä.
Yksityiskohtia sukellusrobotista:

Valonheittimet, kaikuluotaimet ja kamerat rungon alapuolella.

Nenässä oleva voimakas valonheitin ja kamerat.

Peräsin ja sen suojassa oleva työntövoimalaitteisto (potkuri, koska vesisuihkusysteemi on liian vaarallinen veteen, jonka koostumusta ei tunneta).
Kuvia sukellusrobotista altaassa


Kuvat: Jari Mäkinen ja DFKI