Aloitetaan asteroiditapauksen analysointi kokoarviolla.
Kaikkein todennäköisimmin 2024 YR4 on läpimitaltaan noin 55-metrinen. Kuvittele siis eteesi 15-kerroksisen talon korkuinen kivimurikka, joka peittää jalkapallokentän (100x60 m) puolikkaan.
Tuollaisen asteroidin massa on noin 2 miljoonaa tonnia. Se on toisin sanoen 250 kertaa massiivisempi kuin raskain Suomessa operoiva tavarajuna, 18 kertaa massiivisempi kuin Turussa rakennettu Oasis of the Seas -jättiristeilijä, tai kolmanneksen Kheopsin kuulusta pyramidista.
Lisäksi mitat voivat olla jonkin verran suurempia tai pienempiä. Halkaisijasta voidaan sanoa varmasti vain että asteroidi on 40–100 -metrinen. Sen massa taas on 0,3–33 miljoonaa tonnia, tiheydestä riippuen. Materiaali kun voi olla komeettojen tapaan hötyistä jäätä, kivimurskaa, umpikiveä, tai jopa tiivistä rauta-nikkeliseosta. Kaikkea tältä väliltä.

Kokoja on varsin vaikea hahmottaa, mutta Eduskuntatalo Helsingissä on hyvä vertailukohta: sen leveys pohjois-eteläsuunnassa on 78 m ja länsi-itäsuunnassa 55 m. Ristimitta on noin 95 m. Kuva: Jari Mäkinen
Kokoarvio perustuu asteroidin oletettavasti heijastaman valon määrään.
Aurinkokunnassa tiedetään kuljeskelevan niin kirkkaita kuin tummempiakin pienkappaleita. Jos 2024 YR4:n pinta sattuu heijastamaan paljon valoa, sen läpimitta olisi hieman alle 50-metrinen, kun taas tummempana ja huonosti heijastavana kappaleena halkaisija voisi olla jopa sadan metrin luokkaa.
Edellisessä jutussamme mainittu ESA:n arvio on maksimissaan 95 metriä, mutta muutamalla metrillä ei ole ison kuvan kannalta merkitystä.
Jahka asteroidin spektri saadaan mitattua tarkemmin, nähdään kuinka se heijastaa eri aallonpituuksia. Tuolloin pintamaterian laatua voidaan arvioida tarkemmin ja sen koostumus ja halkaisija voidaan lyödä lukkoon varsin tarkkaan. Mutta sen massa on yhä tuolloinkin epäselvä, sillä näistä tiedoista ei vielä pystytä sanomaan että onko ehkä kyse soraläjästä, yhtenäisestä kiinteästä kappaleesta, vai jostain näiden ääripäiden väliltä.

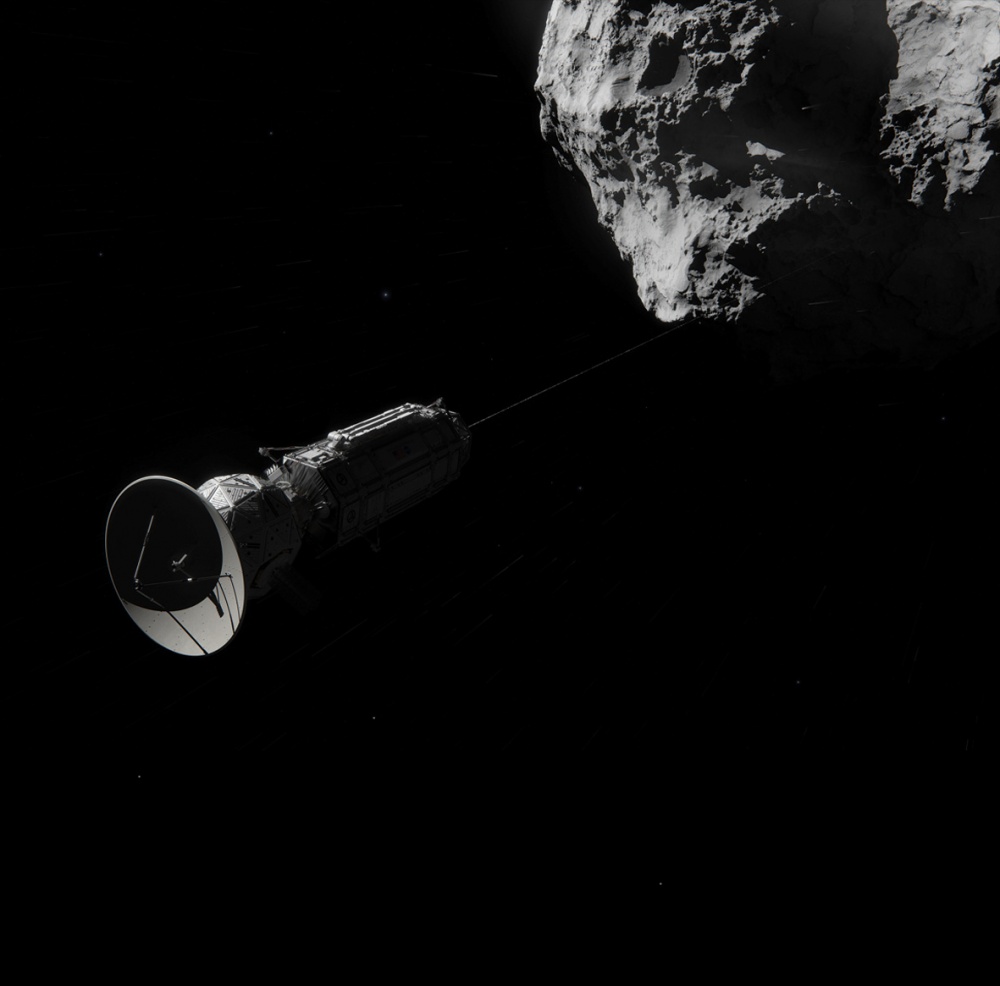
Asteroidi 243 Ida on tyypillinen aurinkokunnan pienkappale, joskin se on kertaluokkaa suurempi kuin 2024 YR4. Halkaisijaltaan Ida on 59,8 × 25,4 × 18,6 kilometriä. Galileo-luotain lensi sen ohi Marsin ja Jupiterin välissä vuonna 1994. Kuva: Nasa.
Törmäystapahtuma hetki hetkeltä
Kuvitellaan, että 2024 YR4 todella törmää. Mitä tuolloin tapahtuisi?
Todennäköisin törmäyshetki näyttää tällä hetkellä olevan 22.12.2032 klo 11:37 Suomen aikaa. Epävarmuutta on tosin muutaman tunnin verran, eli se voi sattua joskus välillä klo 08.09–15.05.
Kunhan törmäysaika lasketaan sekunnilleen, selviää myös lopullinen törmäyspaikka. Nykytiedoilla voidaan sanoa vain, että törmäyspaikka on luultavasti jossain hieman päiväntasaajan pohjoispuolella: Etelä-Amerikassa, Afrikassa, Intiassa, tai niiden välisillä merialueilla.
55-metrinen asteroidi on riittävän suuri näkyäkseen ihan paljaalla silmälläkin ehkä puolisen tuntia ennen törmäystä taivaalla nopeasti liikkuvana valopisteenä. Sen voi kuitenkin erottaa vain yöpuolelta, sieltä mistä katsoen Aurinko sattuu valaisemaan kappaleesta riittävän suurta osaa.
Päiväpuolella asujat eivät kiveä voi nähdä ennen sen tuloa ilmakehään.
Sekä asteroidin kiertonopeus Auringon ympäri että Maan painovoiman vaikutus siihen on saatu laskettua jo varsin tarkkaan. Törmäyksessä asteroidi tunkeutuu ilmakehään huimalla 17 kilometrin sekuntivauhdilla.
Helsingistä pääsisi Tampereelle tuolla vauhdilla 10 sekunnissa. Asteroidin koko ilmalento hoituu samassa ajassa. Ilmassa ehtii kuitenkin tapahtua hyvin paljon.
Ilma asteroidin edessä puristuu kasaan, ionisoituu ja alkaa hehkua, kuumentaen samalla murikan pintaakin ehkäpä noin millin syvyydeltä. Taivaalla näkyy nopeasti suureneva ja paikoin hehkuva pallo. Sen perässä leviää sankka savuvana.
Ilmakehä jarruttaa asteroidia rankasti, rasittaen sen rakennetta äärimmilleen. Siihen syntyy pieniä rakoja ja halkeamia, jotka repeytyvät lopulta auki.
Noin 50 kilometrin korkeudella asteroidi alkaa hajota, mikä tosin näkyy maanpinnalle vain välähdyksinä ja savuvanan hetkellisiä laajentumina. Lopulta 5 – 6 kilometrin korkeudella asteroidi hajoaa lähes täydellisesti suuressa räjähdyksessä.

Noin 15 metriä halkaisijaltaan ollut meteori törmäsi Maahan Tšeljabinskin luona 15. helmikuuta 2013. Se räjähti noin 30–50 kilometrin korkeudessa. Kuva: via ESA.
Räjähdyksen tuloksena pintaan alkaa parin sekunnin päästä ropista meteoriitteja, luultavasti yhä muutaman kilometrin sekuntinopeudella. Mukana on kaikkea tomusta pesukoneen kokoisiin järkäleisiin.
Kivien jysähtelyä maahan voi verrata vaikkapa rypälepommien keskityksen. Rytäkässä syntyy pieniä kraatterinpoikasia sinne sun tänne. Mutta tämä pommitus rajautuu kuitenkin pääosin asteroidin alkuperäiseen lentosuuntaan. Se ei suinkaan ole pahinta mitä on luvassa.

Arizonassa oleva Barringerin kraatteri on noin 1200 metriä leveä ja 170 metriä syvä. Sen synnytti Maahan osunut noin 50-metrinen nikkelirauta-asteroidi 50 000 vuotta sitten. Tiedetuubin Klubi vieraili paikalla vuonna 2017. Kirjoittaja on eturivissä neljäs vasemmalta. Kuva: Jari Mäkinen.
Paineaalto
Törmäyksen suurin haitta tulee suoraan ilmassa tapahtuneesta räjähdyksestä. Voimakkuudeltaan posaus on noin kahdeksaa megatonnia TNT:tä, vastaten suurta vetypommia. Siitä lähtevä paineaalto suuntautuu tasaisesti joka suuntaan, kaataen ja murskaten taloja, puita, siltoja – lähes kaikki maanpäälliset rakenteet. Äänen nopeudella etenevä paineaalto saavuttaa minuutissa 20 kilometrin etäisyyden.
Tämä nähtiin selvästi vuonna 2013 tapahtuneessa Tšeljabinskin meteoritörmäyksessä: paineaalto sai aikaan suuria vaurioita, kappaleiden putoaminen maahan ei.
Suoraan räjähdyksen alla olevasta pisteestä täytyy mennä noin viiden kilometrin päähän, jotta selviäminen olisi mahdollista muutoin kuin aivan ihmeen kaupalla. Todennäköistä se alkaa kuitenkin olla vasta 15 kilometrin päässä.
Merellä sattuessaan paineaalto puskee alleen jopa parikilometrisen kraatterin, joka kuitenkin oikenee nopeasti. Samalla syntyy ulospäin leviävä tsunamiaalto. Aivan kraatterin reunalla sen korkeus on useita kymmeniä metrejä, mutta jo 10 kilometrin päässä vain 2–4 metriä.
Symmetrisyydestä ja veden edestakaisesta loiskahtelusta johtuen tsunamia ei 20 kilometrin etäisyydellä enää ehkä edes huomaa.
Nyt määritellyllä vaaravyöhykkeellä elää vähintään 200 miljoonaa ihmistä.
Miljoonakaupunkeja alueella on hieman yli 30 kappaletta. Äärimmäisen ikävästi osuessaan asteroidi voisi tuhota hetkessä vaikkapa jonkin jättimäisen metropolin, kuten Bogotan (11 miljoonaa asukasta), Kalkutan (15 milj.), Lagosin (21 milj.), Mumbain (23 milj.) tai Dhakan (24 milj.).

Rajattu alue osoittaa tämänhetkisen törmäysriskin alueen, pohjalla on vuoden 2020 väestöntiheyskartta. Kuva: Daniel Bamberger / Duncan Smith (LuminoCity3D) / Jarmo Korteniemi.
Onneksi törmäys on hyvin epätodennäköinen, ja osuminen kaupunkiin on vielä hirmuisen paljon epätodennäköisempää.
Nämä vaikutukset on laskettu uumoillun kokoiselle 55-metriselle kiviasteroidille. Laskennallisesti moisia törmää Maahan keskimäärin tuhannen vuoden välein.
Hieman pienempi tai harvempaa materiaalia oleva asteroidi räjähtäisi korkeammalla ja pienemmällä voimakkuudella. Sen synnyttämä paineaalto ei yltäisi yhtä vahvana yhtä kauas, eikä tuhovaikutus olisi yhtä mittava. Kaupungin päälle osuessaan kuolonuhreilta ei luultavasti voitaisi kuitenkaan välttyä, jos alla olevia alueita ei evakuoitaisi ajoissa.
Suurempi (tai tiheämpi) murikka räjähtäisi joko alempana ilmassa, tai yltäisi maahan asti ja siirtäisi energiastaan aimo osan kiveen. Tuolloin pahin ongelma ei lähiympäristössä olisi paineaalto, vaan niskaan satava kiviaines.
Kaikeksi onneksi 2024 YR4 on riittävän pieni (ja törmäyshetki on vielä tarpeeksi kaukana) että törmäys voitaisiin nykytekniikalla välttää. Toimeen täytyisi kuitenkin ryhtyä pian sen jälkeen jos ja kun törmäys varmistuu.
Riittää, että sen vauhtia hidastetaan tai nopeutetaan vain hieman, jotta se ei ole Maan kanssa samassa pisteessä aivan tismalleen samaan aikaan. DART-luotain osoitti vuonna 2022, että suurempikin asteroidi liikahtaa riittävästi kun saa vain riittävän nopean töytäisyn raskaalla laitteella.

DARTin törmäys Dimorphosiin kuvattuna Etelä-Afrikassa olevalla Lesedi-teleskoopilla. Kuva: SAAO
Mitä aikaisemmin asteroidia päästään tuuppimaan, sitä helpommin sen sijaintiin Maan luona vuonna 2032 voisi vaikuttaa.
Toisaalta, jos törmäyspaikka olisi riittävän syrjäinen, asteroidin kannattaisi ehdottomasti antaa törmätä. Törmäysprosessia ja sen vaikutuksia olisi nimittäin tärkeätä päästä tutkimaan ihan todellisessa maailmassa – tämä kappale kun on tarpeeksi suuri, mutta ei kuitenkaan niin iso, että sillä olisi maailmanlaajuisia vaikutuksia.
Olisi hyvä päästä varmistamaan että simulaatiot antavat edes suurpiirteisesti oikeata tietoa.
Tarkasti ennustettu ja seurattu isohko törmäys olisi täysin ainutlaatuinen tapahtuma koko ihmiskunnan historiassa. Pääsisimme kerrankin näkemään Aurinkokunnan yleisimmän geologisen prosessin toimessa.
Peukut pystyyn!
-
Otsikkokuvassa on liitetty yhteen Apollo-astronauttien kuvaama maapallo ja Lutetia-asteroidi. Alkuperäiset kuvat: Nasa.